This week's accomplishments:
-
The group has been given a servo motor from Drexel Hybrid SAE. The group is currently attempting to determine whether it would be easier to go with the servo than the low speed motor, and whether it is feasible to include it this late in the design.
The servo motor's ability to move to any arbitrary position would be invaluable, and would simplify controls down to just a potentiometer, but it may be too late to include it into the design at this point, as it would require new waterproofing boxes.
-
Finished waterproofing motors.
 |
| The existing SeaPerch motors, taped up and ready to go in their waterproof capsules. |
 |
| The new motor in its waterproof box. |
|
 |
The box holds water from the inside, so presumably it also will keep out water from the outside.
|
-
Finalized Solidworks design.
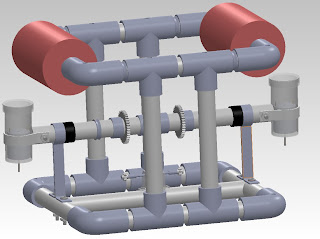 |
| Figure 4: The belt system has been disregarded in favor of a system that uses LEGO chains to drive the center pole. This system will provide much more adhesion and should work much better underwater than a plain belt system would. |
Next week's goals: Design propellers, fabricate propellers, assemble SeaPerch to the extent that it can be.



.JPG)
.JPG)
.JPG)





